-1.png?width=860&height=350&name=Corgin%2025%20Years%20Primary%20Logo%20Landscape%20(RGB)-1.png)

Several different starting methods for AC induction motors are required because the power draw is much higher during initial start-up than once the motor at full speed. For small motors this might not cause any issues, however for larger motors this spike is significant and so different starting methods are used to limit the power surge and protect the power supply from damage.
When power is applied to a stationary motor, there is an initial inrush current, as the stator winding creates the magnetic field which causes the motor to begin turning. This stator field induces a field in the rotor windings, generating a voltage known as back EMF; this opposes the supply voltage and so limits the running current. However, when the motor is stationary, there is no induced voltage, so the supply current can spike up to 10 times the normal running current. This initial spike gradually reduces as the motor accelerates, until reaching the normal running speed. The starting current will last for longer if the motor is started under load.
The power supply to the site or application will have been designed for a specified power requirement. If electric motors are later installed the running loads might still be acceptable, but the requirement on start-up could exceed the design power supply, causing fuses to blow or cables to burn out.
Why do you need to select the correct option?
The use of voltage control in various ways reduces the motor torque on start-up, thus reducing the current spike to an acceptable level. However, consideration needs to be given to the application as not all starting methods are suitable in every situation. Some situations have variable torque characteristics, for example a fan running at 50% speed only requires 25% of the torque and 12.5% of the power. Other situations have constant torque, for example a loaded conveyor belt requires the same torque to move the load at low speed as at high speed, so the power requirement is directly proportional to the speed, i.e.50% speed = 50% power.
Direct online (DOL) starting
A DOL starter is simply an on and off switch, in the form of a contactor. Most switches and isolators are not designed to switch under load, and the lighter contacts of these switches will burn out if used for this purpose.
Imagine bringing 2 bare wires together to complete a circuit. As the wires are almost touching, a spark will be created which is also known as an electric arc. This can generate temperatures up to 5,000 degrees Celsius! The same happens between the contacts of a switch, and if this occurs at a current beyond the rating of the switch, damage to the contacts will occur.
In a contactor circuit, a low power control circuit is activated by a simple switch, which in turn activates the contactor, the power supply is turned on and the motor (or other power load) starts.
The DOL method is usually only used for smaller motors, where the power spike is smaller and the motor can start without tripping the supply protection breaker or fuse. These breakers or fuses must be rated for motor starting, with longer trip times to allow for the current spike. A thermal or electronic overload relay is usually included in a motor starter as protection for the motor in the case of overload.
DOL is the simplest and cheapest starting mode but calculations need to be made by an electrical engineer to ensure the supply can provide the needed starting current. With larger motors, the increase in cost of heavier duty components and cables makes it less economical than other starting methods.
Star-Delta starting
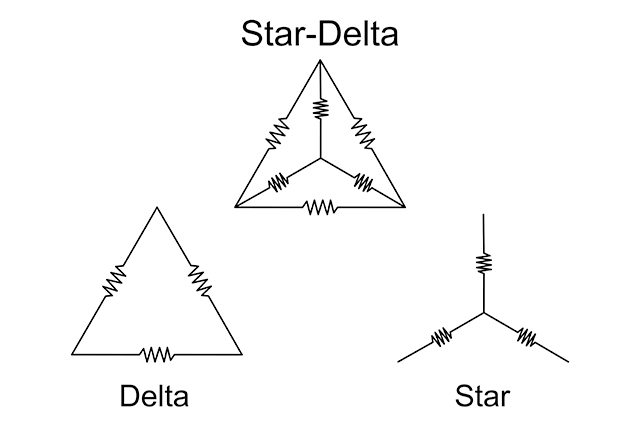
Some motors can be started using the Star-Delta method: the motor is first connected in ‘Star’ configuration, i.e. the current flows through 2 motor windings in series, reducing the voltage in each coil. This allows the motor to gather speed while drawing only 1/3 of the Delta current. Once the motor is up to 80% of full speed (or a preset time is elapsed) it is then connected in the normal ‘Delta’ configuration, i.e. a single winding at full voltage, drawing full load current.
This method can reduce the starting current demand to 33% but is only suited to applications where the motor is starting without load (e.g. where a clutched gearbox is used or for a fan motor). It is difficult to set the change-over from Star to Delta at the correct speed, which should be 80% of full load speed, and during change-over the motor acts as a generator, producing a 'transient' voltage, which can result in a second current spike.
The following diagrams show the theoretical winding configurations, which are controlled by switching the coil connections. In Star, the 400v applied voltage is reduced to 230v across 2 windings, while drawing 1/3 of the current and reducing the power used to turn the motor. When configured to Delta each winding in turn receives the full applied voltage of 400v at full current.
Soft starting
A soft starter is an electronic or solid state device which controls the voltage flowing to the motor at start-up. By slowly ramping up the supply voltage to the motor, a smooth start without excessive current flow can be achieved. The torque characteristics must be specified when selecting the soft starter.
Soft starters are more expensive than DOL or star-delta, but they are widely used due to their convenience and simplicity.
Variable speed drives
A variable speed drive (VSD), also known as a Variable Frequency Drive (VFD) or Variable Voltage Variable Frequency (VVVF), is an electronic device which allows complete control of the motor speed including starting, running speed and stopping. It operates by altering the frequency of the power supply to the motor.
A VSD is extremely versatile and often used in process applications where a constant pressure or flow needs to be maintained. In addition, because the motor can be run at a slower speed and hence use less energy, use of a VSD can facilitate significant power savings.
Variable speed drives are generally the most expensive method of motor starting, but their versatility means they are very widely used.



Share This Post
LinkedIn Facebook Twitter Google Plus Email